Guia de Software
Este é um guia para usar e configurar o robô em simulação. A seguir estão os comandos e configurações necessários para diferentes cenários de uso.
Iniciar o robô na simulação
Para iniciar o robô na simulação, você pode usar os seguintes comandos:
- Iniciar o robô na simulação básica
bash
make tf
- Iniciar o robô na simulação sem mundo
bash
make sim2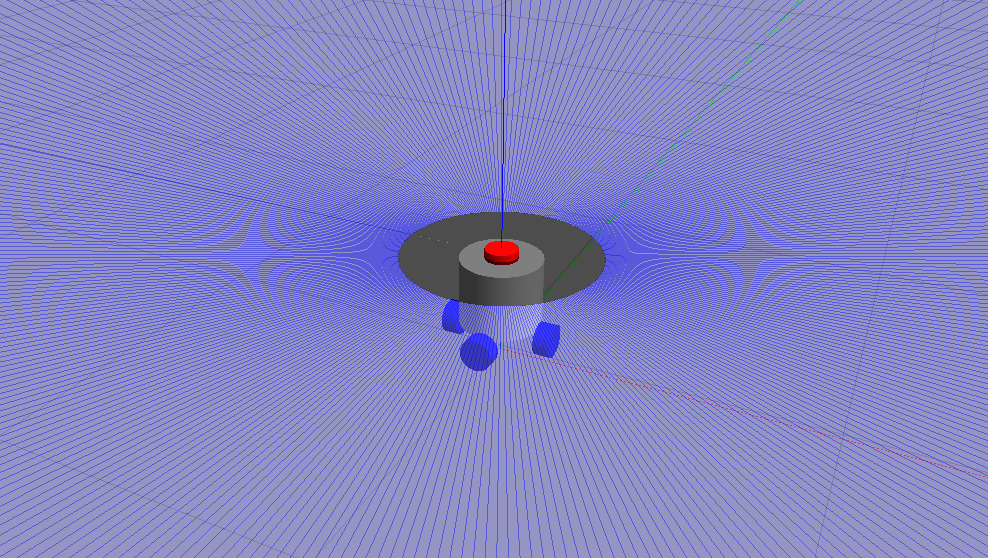
- Iniciar o robô na simulação com mundo
bash
make sim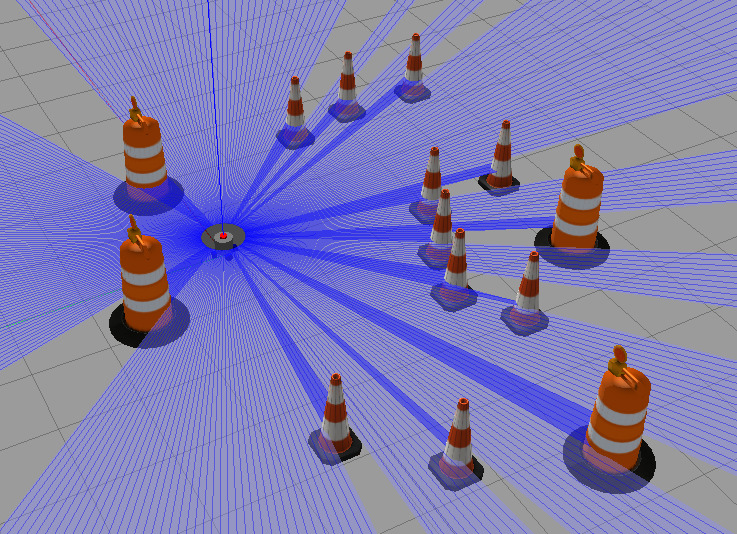
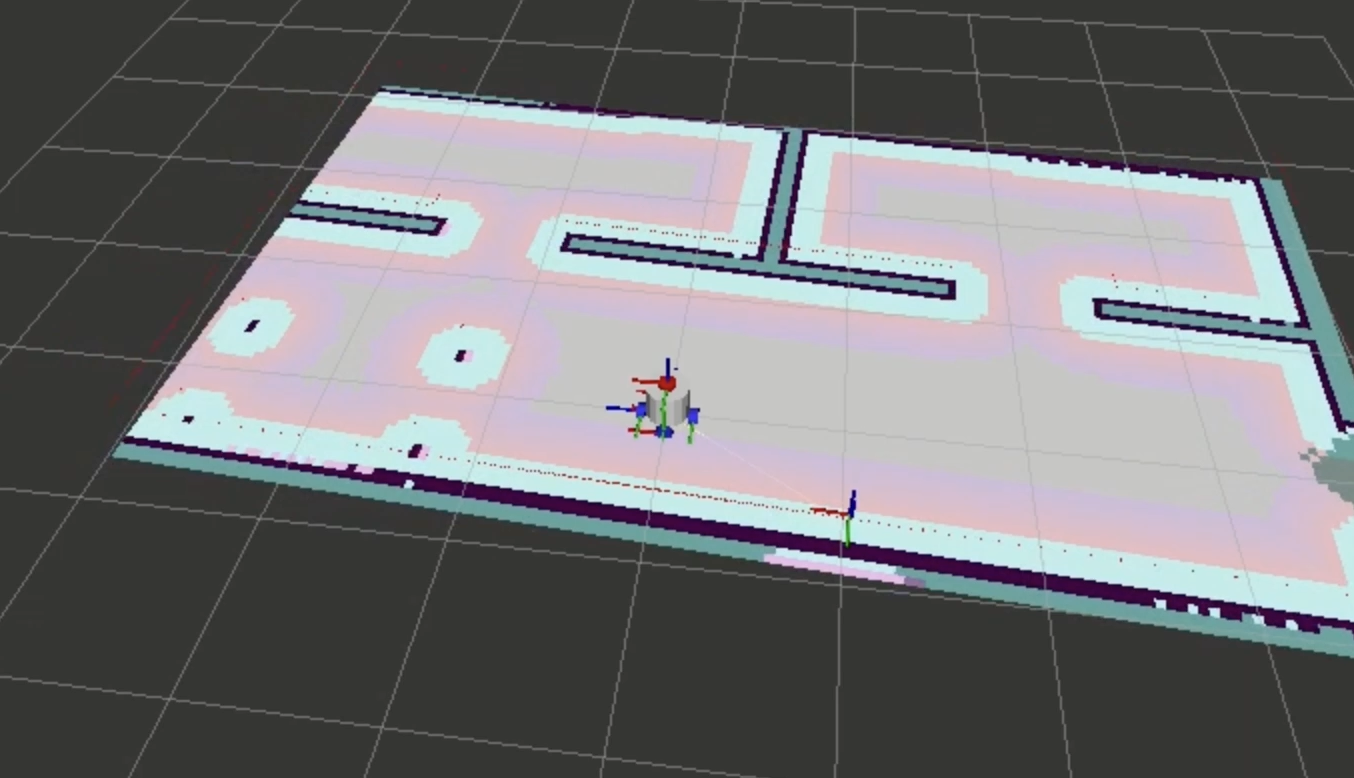
- Iniciar o robô na simulação com SLAM Se você deseja iniciar o robô na simulação com SLAM (mapeamento e localização simultâneos), siga as etapas abaixo:
bash
# terminal 1
make sim
# terminal 2
make slam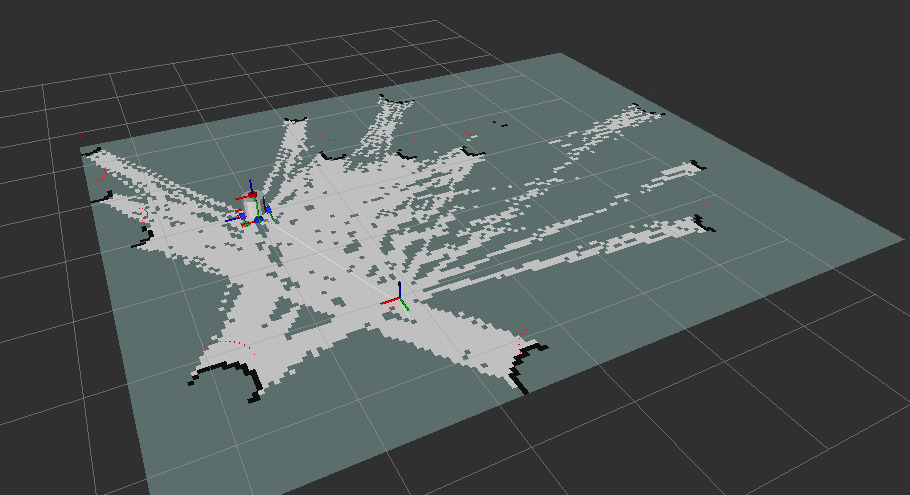
- Iniciar o robô na simulação com AMCL Para iniciar o robô na simulação com AMCL (Adaptive Monte Carlo Localization), siga as etapas abaixo:
bash
# terminal 1
make sim
# terminal 2
make amcl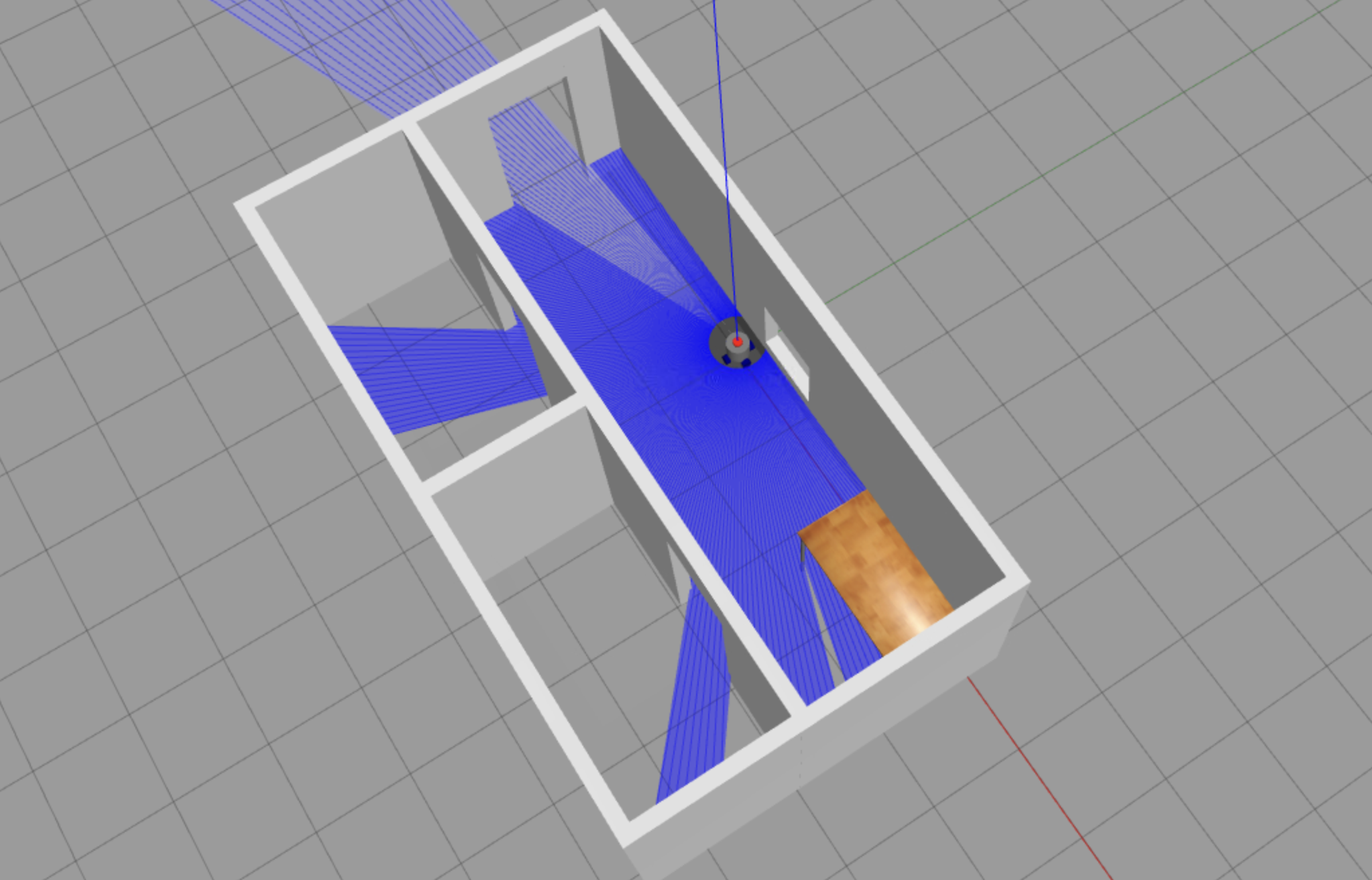
- Iniciar o robô na simulação com navegação Para iniciar o robô na simulação com navegação, siga as etapas abaixo:
bash
# terminal 1
make sim2
# terminal 2
make navigation