Configuração do Sistema
O sistema utilizado no projeto foi dividido em pacotes, seguindo uma estrutura similar ao ROS (Robot Operating System). O pacote principal, chamado navtech, contém todo o sistema de simulação e navegação do robô.
docs/ # Documentação do projeto
src/
├── navtech/
│ ├── robot/
│ │ ├── config/ # Arquivos de configuração
│ │ ├── description/ # Arquivos URDF
│ │ ├── launch/ # Arquivos de lançamento
│ │ ├── robot/ # Arquivos de código-fonte
│ │ ├── worlds/ # Arquivos de mundo
│ │ ├── CMakeLists.txt
│ │ ├── package.xmlA estrutura do pacote navtech é a seguinte:
A pasta
configcontém todas as especificações do robô para mapeamento e navegação, além de possuir o mapa do ambiente e um arquivo de RViz para visualização do robô.A pasta
descriptioncontém o arquivo URDF do robô, que é utilizado para a simulação do robô, juntamente com os controladores e sensores especificados no arquivorobot.urdf.xacro.A pasta
launchcontém os arquivos de lançamento do robô, que são utilizados para iniciar a simulação do robô. Os principais arquivos sãonavigation.launchesimulation.launch, que são utilizados para iniciar a navegação e a simulação do robô, respectivamente.As pastas
testeworldscontêm os arquivos de teste e os arquivos de mundo, respectivamente.
Configuração do Ambiente
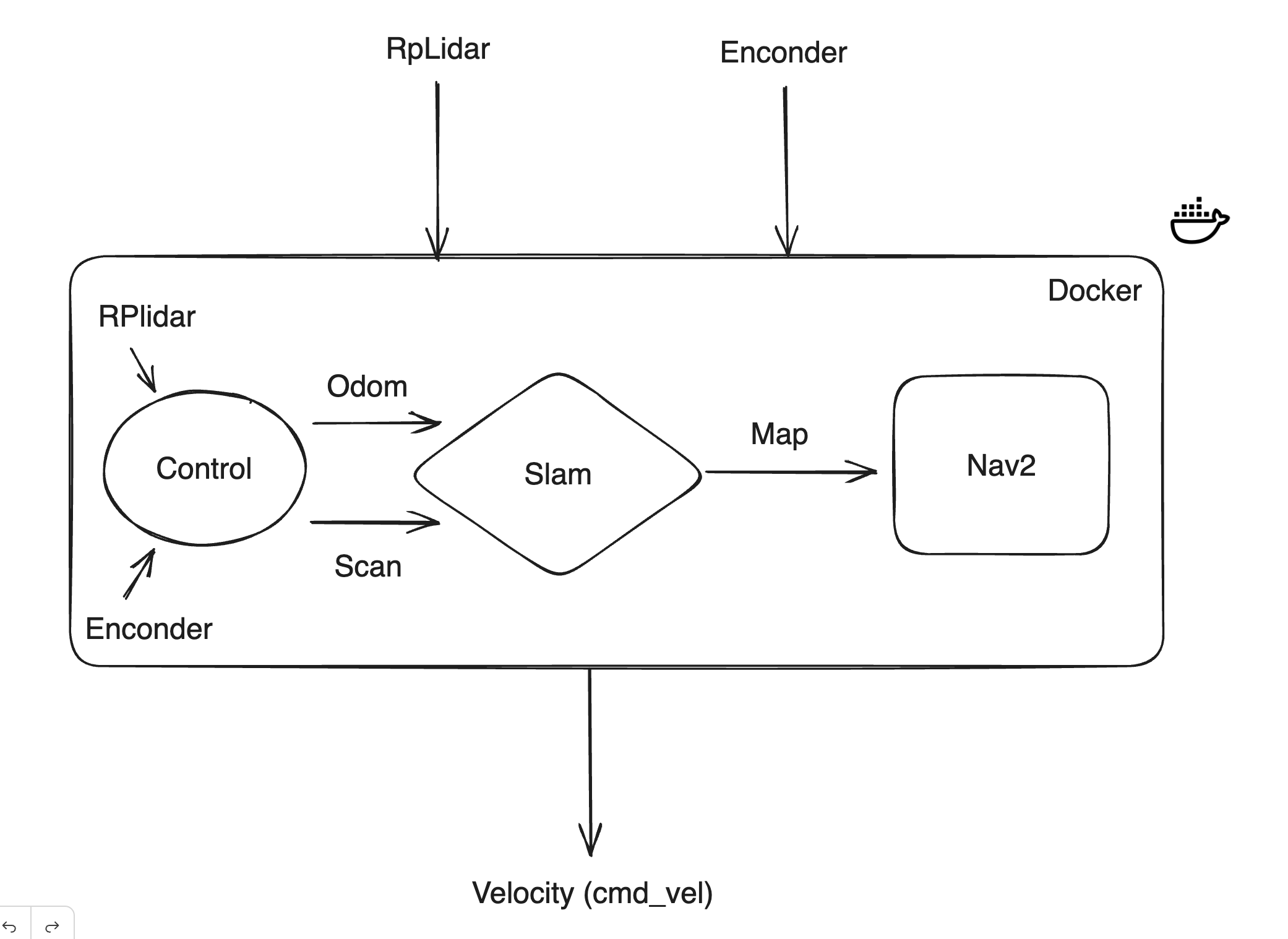
Para configurar o ambiente, é necessário ter o Docker instalado em sua máquina, pois todo o sistema é construído em cima de um container. Você pode encontrar as instruções de instalação do Docker em Docker.
O arquivo Makefile contém todos os comandos necessários para a execução do sistema. Para executar o sistema, basta abrir o terminal e executar o comando make run.
Isso iniciará a simulação juntamente com o objetivo do robô, que é passar por todos os waypoints, demonstrando a navegação do robô.
Certifique-se de ter todas as dependências e requisitos de software instalados antes de executar o sistema.
Para mais informações e detalhes sobre o projeto, consulte a documentação disponível na pasta docs.